Robot introspection System
2017, Sep 11
Task Representation
- Finite State Machine + Dynamical Movement Primitives (Current Solution)
2. Automatically generate the manipulation graph by segmenting the demonstrations
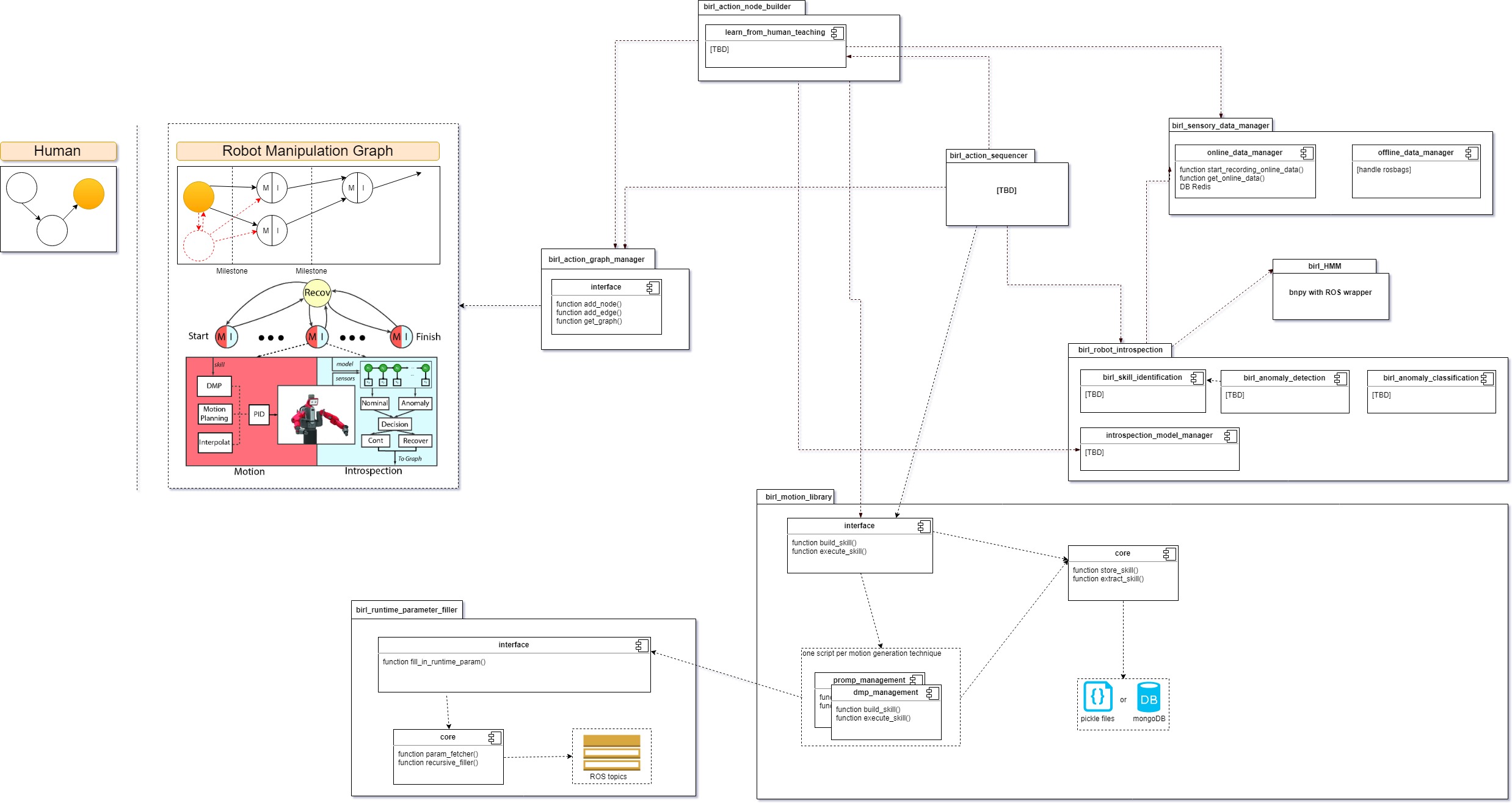
2.1 Skill library
2.2 Skill sequencing (decision making)
Multimodal Feature Engineering
Introspection Models Construction
note: we should consider all the possible scienios for training a introspection model, espectically, in case of the classifier model.
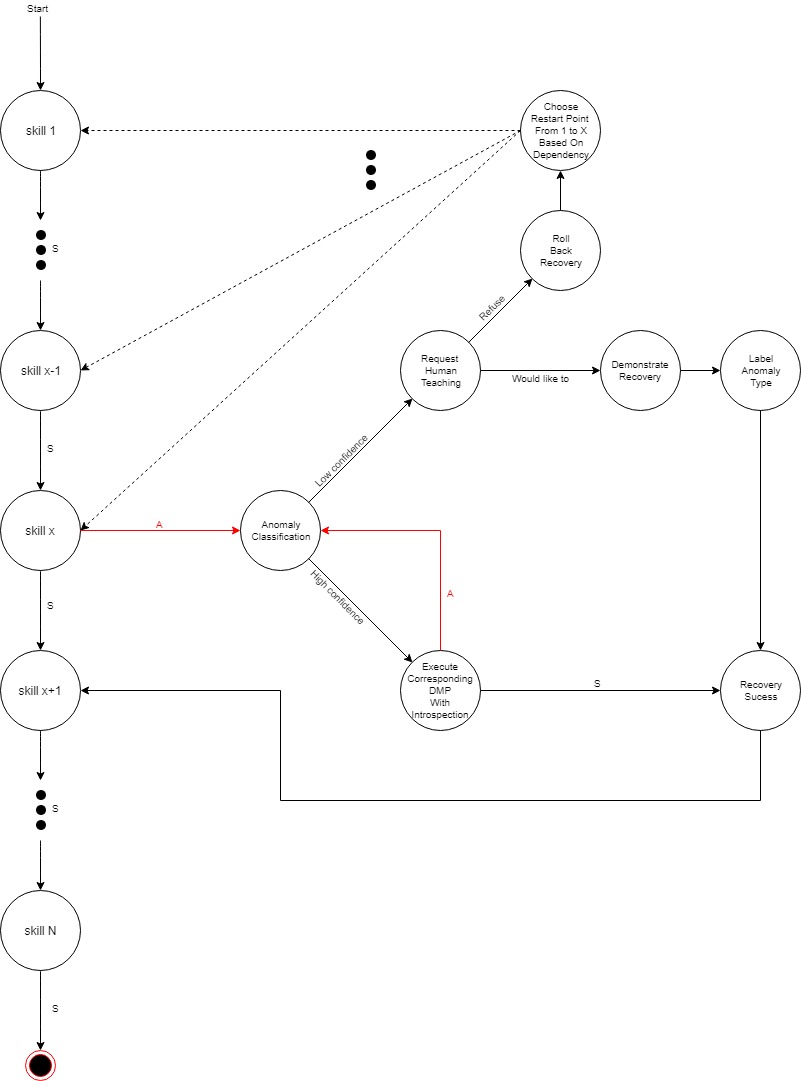
Anomaly Detection
Anomaly Classification
Anomaly Recovery