IEEE RO-MAN Conference Tutorial
Ojective
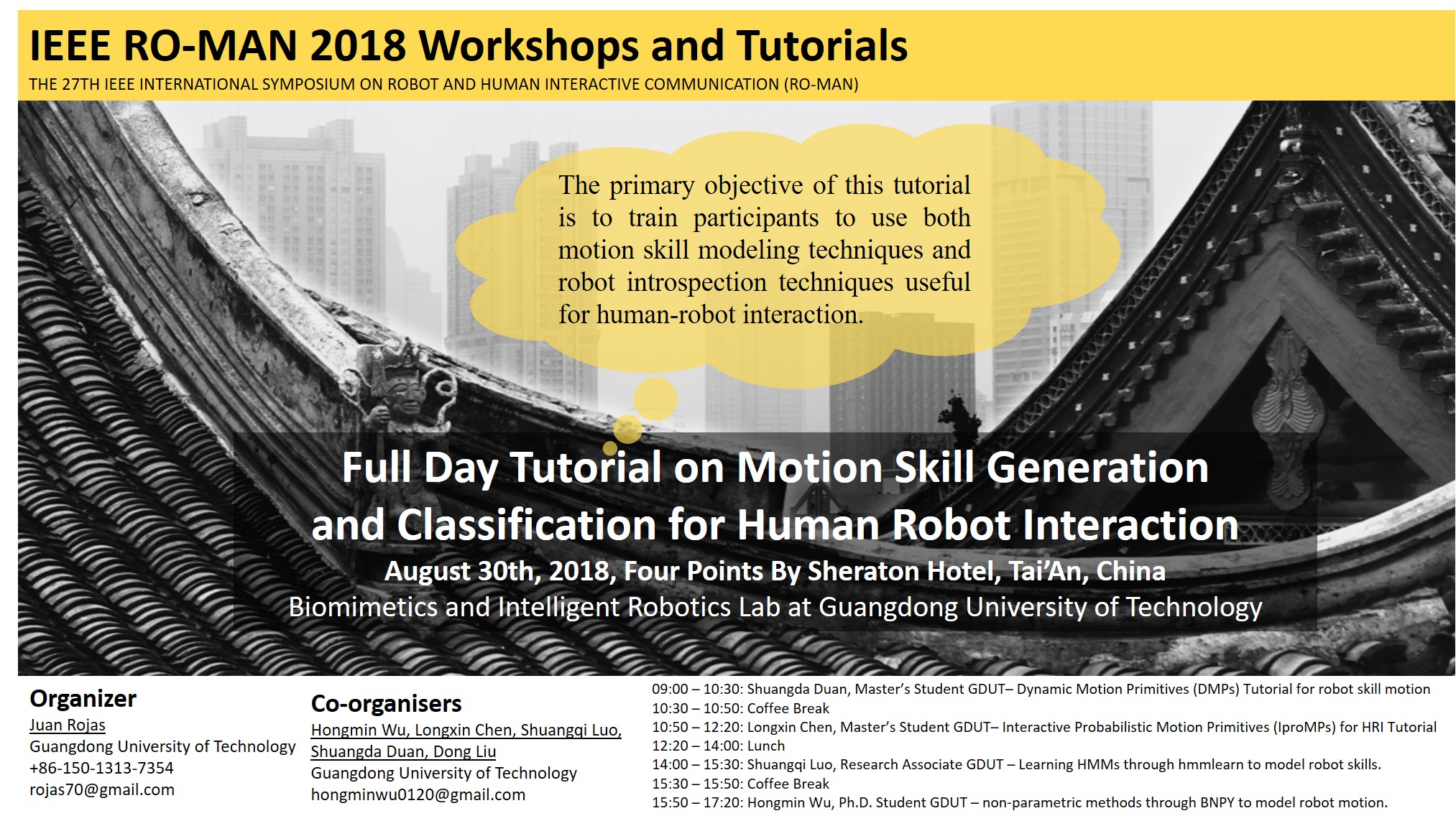
The goal of this tutorial is to train participants to use both motion skill modeling techniques and robot introspection techniques useful for human-robot interaction. In particular, we think that a local audience might benefit the most from such tutorial, though attendees from all locations can benefit and are welcome as well.
Dynamic Motion Primitives and (Interactive) Probabilistic Motion Primitives are two techniques that have been often used in research to model and generate motion trajectories. Such motion primitives have many desirable properties: they can compactly parametrize a motion with high DoF, parameters are easily modulated to achieve flexible goals and learning, skills can be easily modulated temporally, as well as skills can easily be sequences or combined.
The goal is to train attendees on the core concepts of these two techniques, one based on Linear Dynamical Systems, the other in probabilistic methods, to model motion skills for both humans and robots. These techniques can also be used to re-generate trained skills with limited variation.
On the other hand, the traditional Hidden Markov Models (HMM) and its more powerful modeling variants like non-parametric Markov Jump Linear Switch Systems are also introduced as they are useful in describing complex behavior and have been extensively used throughout robotics.
The goal is to train attendees on how to use these models for inference, learning, and classification of human/robot motions in HRI tasks through the use of powerful and open-source libraries such as HMMLearn and BNPY. We believe that this practical tutorial would garner wide interest and would be useful as all teaching would be accompanied by open-source examples and demonstrations in HRI.
Event
Hongming Wu, Ph.D. Student GDUT – non-parametric methods through BNPY to model robot motion.